Общее устройство и принцип полёта вертолёта
Вертолет – это винтокрылая машина, в которой подъемную силу и силу тяги создает винт. Несущий винт служит для поддержания и перемещения вертолета в воздухе. При вращении в горизонтальной плоскости несущий винт создает тягу(Т) направленную вверх, выполняет роль подъёмной силы(Y). Когда тяга несущего винта будет больше веса вертолета(G), вертолет без разбега оторвется от земли и начнет вертикальный набор высоты. При равенстве веса вертолета и тяги несущего винта вертолет будет неподвижно висеть в воздухе. Для вертикального снижения достаточно тягу несущего винта сделать несколько меньше веса вертолета. Поступательное движение вертолета(P) обеспечивается наклоном плоскости вращения несущего винта при помощи системы управления винтом. Наклон плоскости вращения винта вызывает соответствующий наклон полной аэродинамической силы, при этом ее вертикальная составляющая будет удерживать вертолет в воздухе, а горизонтальная — вызывать поступательное перемещение вертолета в соответствующем направлении.
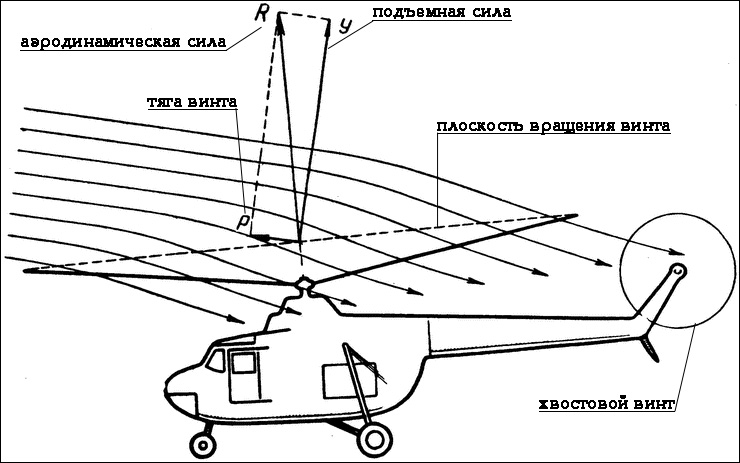
Рис 1. Схема распределения сил
Конструкция вертолета
Фюзеляж является основной частью конструкции вертолета, служащей для соединения в одно целое всех его частей, а также для размещения экипажа, пассажиров, грузов, оборудования. Он имеет хвостовую и концевую балки для размещения хвостового винта вне зоны вращения несущего винта,и крыла (на некоторых вертолетах крыло устанавливается с целью увеличения максимальной скорости полета за счет частичной разгрузки несущего винта (МИ-24)).Силовая установка(двигатели)является источником механической энергии для приведения во вращение несущего и рулевого винтов. Она включает в себя двигатели и системы, обеспечивающие их работу (топливную, масляную, систему охлаждения, систему запуска двигателей и др.). Несущий винт(НВ) служит для поддержания и перемещения вертолета в воздухе, и состоит из лопастей и втулки несущего винта. Рулевой винт служит для уравновешивания реактивного момента, возникающего при вращении несущего винта, и для путевого управления вертолетом. Сила тяги рулевого винта создает момент относительно центра тяжести вертолета, уравновешивающий реактивный момент несущего винта. Для разворота вертолёта достаточно изменить величину тяги рулевого винта. Рулевой винт так же состоит из лопастей и втулки. Управление несущим винтом производится при помощи специального устройства, называемого автоматом перекоса. Управление рулевым винтом производится от педалей. Взлетно-посадочные устройства служат опорой вертолета при стоянке и обеспечивают перемещение вертолета по земле, взлет и посадку. Для смягчения толчков и ударов они снабжены амортизаторами. Взлетно-посадочные устройства могут выполняться в виде колесного шасси, поплавков и лыж
Рис.2 Основные части вертолета:
1 — фюзеляж; 2 — авиадвигатели; 3 — несущий винт (несущая система); 4 — трансмиссия; 5 — хвостовой винт; 6 — концевая балка; 7 — стабилизатор; 8 — хвостовая балка; 9 — шасси
Принцип создания подъемной силы винтом и система управления винтом
При вертикальном полете полная аэродинамическая сила несущего винта выразится как произведение массы воздуха, протекающего через поверхность, сметаемую несущим винтом за одну секунду, на скорость уходящей струи:
где πD2/4 - площадь поверхности, ометаемой несущим винтом; V— скорость полета в м/сек; ρ— плотность воздуха; u — скорость уходящей струи в м/сек.
По сути сила тяги винта равна силе реакции при ускорении воздушного потока
Для того чтобы вертолет двигался поступательно, нужен перекос плоскости вращения винта, причем изменение плоскости вращения достигается не наклоном втулки несущего винта (хотя визуальный эффект может быть именно такой), а изменением положения лопасти в разных частях квандрантов описываемой окружности.
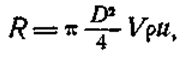
Лопасти несущего винта, описывая полный круг вокруг оси при его вращении, обтекаются встречным потоком воздуха по-разному. Полный круг – это 360º. Тогда примем заднее положение лопасти за 0º и далее через каждые 90º полный оборот. Так вот лопасть в интервале от 0º до 180º – это лопасть наступающая, а от 180º до 360º –отступающая. Принцип такого названия, я думаю, понятен. Наступающая лопасть движется навстречу набегающему потоку воздуха, и суммарная скорость ее движения относительно этого потока возрастает потому что сам поток, в свою очередь, движется ей навстречу. Ведь вертолет летит вперед. Соответственно растет и подъемная сила.
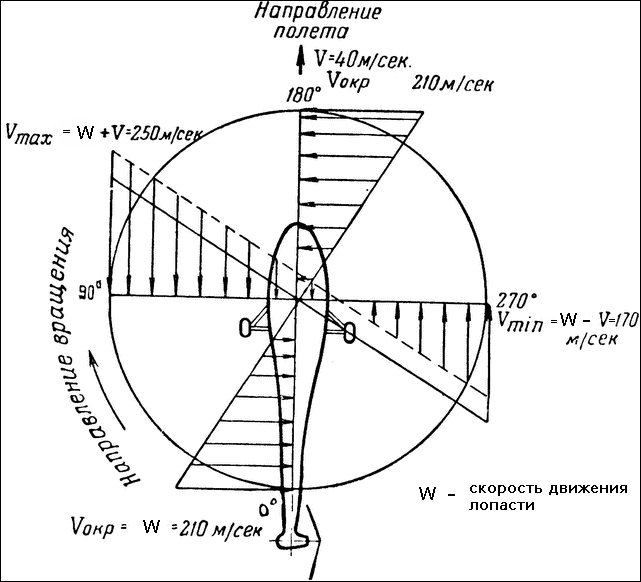
Рис.3 Изменение скоростей набегающего потока при вращении винта для вертолета МИ-1 (средние скорости полета).
У отступающей лопасти картина противоположная. От скорости набегающего потока отнимается скорость, с которой эта лопасть как бы от него «убегает»  . В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент. При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов. . В итоге имеем подъемную силу меньше. Получается серьезная разница сил на правой и левой стороне винта и отсюда явный переворачивающий момент. При таком положении вещей вертолет при попытке движения вперед будет иметь тенденцию к переворачиванию. Такие вещи имели место при первом опыте создания винтокрылых аппаратов.
Чтобы этого не происходило, конструктора применили одну хитрость. Дело в том, что лопасти несущего винта закреплены во втулке (это такой массивный узел, насаженный на выходной вал), но не жестко. Они с ней соединены с помощью специальных шарниров (или устройств, им подобных). Шарниры бывают трех видов: горизонтальные, вертикальные и осевые.
Теперь посмотрим что же будет происходить с лопастью, которая подвешена к оси вращения на шарнирах. Итак, наша лопасть вращается с постоянной скоростью без каких-либо управляющих воздействий извне.
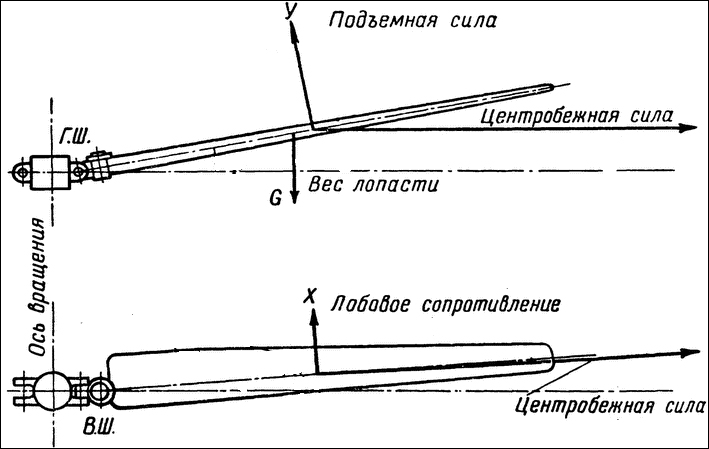
Рис. 4 Силы, действующие на лопасть, подвешенную ко втулке винта на шарнирах.
От 0º до 90º скорость обтекания лопасти растет, значит растет и подъемная сила. Но! Теперь лопасть подвешена на горизонтальном шарнире. В результате избыточной подъемной силы она, поворачиваясь в горизонтальном шарнире, начинает подниматься вверх ( специалисты говорят «делает взмах»). Одновременно из-за увеличения лобового сопротивления (ведь скорость обтекания возросла) лопасть отклоняется назад, отставая от вращения оси винта. Для этого как раз и служит вертикальный шар-нир.
Однако при взмахе получается, что воздух относительно лопасти приобретает еще и некоторое движение вниз и, таким образом, угол атаки относительно набегающего потока уменьшается. То есть рост избыточной подъемной силы замедляется. На это замедление оказывает свое дополнительно влияние отсутствие управляющего воздействия. Это значит, что тяга автомата перекоса, присоединенная к лопасти, сохраняет свое положение неизменным, и лопасть, взмахивая, вынуждена поворачиваться в своем осевом шарнире, удерживаемая тягой и, тем самым, уменьшая свой установочный угол или угол атаки по отношению к набегающему потоку. (Картина происходящего на рисунке. Здесь У – это подъемная сила, Х – сила сопротивления, Vy – вертикальное движение воздуха, α – угол атаки.)
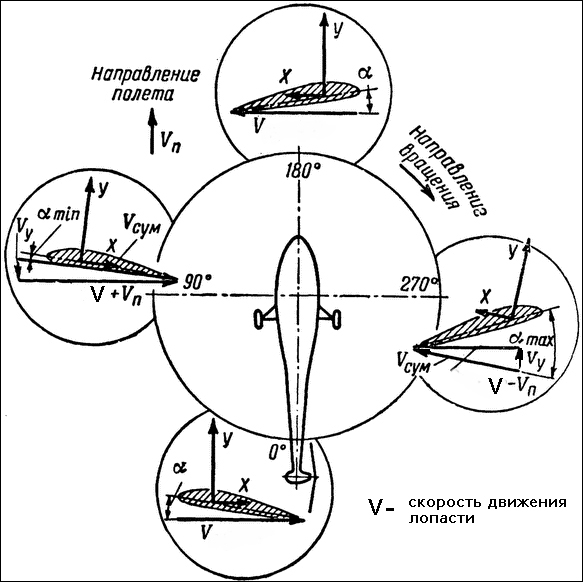
Рис.5 Картина изменения скорости и угла атаки набегающего потока при вращении лопасти несущего винта.
До точки 90º избыточная подъемная сила будет продолжать расти, однако из-за вышесказанного со все большим замедлением. После 90º эта сила будет уменьшаться, но из-за ее присутствия лопасть будет продолжать двигаться вверх, правда все медленнее. Максимальную высоту взмаха она достигнет уже несколько перевалив за точку 180º. Это происходит потому, что лопасть имеет определенный вес, и на нее действуют еще и силы инерции.
При дальнейшем вращении лопасть становится отступающей, и на нее действуют все те же процессы, но уже в обратном направлении. Величина подъемной силы падает и центробежная сила вместе с силой веса начинают опускать ее вниз. Однако при этом растут углы атаки для набегающего потока (теперь уже воздух движется вверх по отношению к лопасти), и растет установочный угол лопасти из-за неподвижности тягавтомата перекоса вертолета. Все происходящее поддерживает подъемную силу отступающей лопасти на необходимом уровне. Лопасть продолжает опускаться и минимальной высоты взмаха достигает уже где-то после точки 0º, опять же из-за сил инерции.
Таким образом, лопасти вертолета при вращении несущего винта как бы «машут» или еще говорят «порхают». Однако это порхание вы, так сказать, невооруженным взглядом вряд ли заметите. Подъем лопастей вверх (как и отклонение их назад в вертикальном шарнире) очень незначительны. Дело в том, что на лопасти оказывает очень сильное стабилизирующее воздействие центробежная сила. Подъемная сила, например, больше веса лопасти в 10 раз, а центробежная – в 100 раз. Именно центробежная сила превращает на первый взгляд «мягкую» гнущуюся в неподвижном положении лопасть в жесткий, прочный и отлично работающий элемент несущего винта вертолета вертолета.
Однако несмотря на свою незначительность вертикальное отклонение лопастей присутствует, и несущий винт при вращении описывает конус, правда очень пологий. Основание этого конуса и есть плоскость вращения винта (см рис1.)
Для придания вертолету поступательного движения нужно эту плоскость наклонить, дабы появилась горизонтальная составляющая полной аэродинамической силы, то есть горизонтальная тяга винта. Иначе говоря, нужно наклонить весь воображаемый конус вращения винта. Если вертолету нужно двигаться вперед, значит конус должен быть наклонен вперед.
Исходя из описания движения лопасти при вращении винта, это означает, что лопасть в положении 180º должна опуститься, а в положении 0º (360º) должна подняться. То есть в точке 180º подъемная сила должна уменьшиться, а в точке 0º(360º) увеличиться. А это в свою очередь можно сделать уменьшив установочный угол лопасти в точке 180º и увеличив его в точке 0º (360º). Аналогичные вещи должны происходить при движении вертолета в других направлениях. Только при этом, естественно, аналогичные изменения положения лопастей будут происходить в других угловых точках.
Понятно, что в промежуточных углах поворота винта между указанными точками установочные углы лопасти должны занимать промежуточные положения, то есть угол установки лопасти меняется при ее движении по кругу постепенно, циклично.Он так и называется циклический угол установки лопасти (циклический шаг винта). Я выделяю это название потому, что существует еще и общий шаг винта (общий угол установки лопастей). Он изменяется одновременно на всех лопастях на одинаковую величину. Обычно это делается для увеличения общей подъемной силы несущего винта.
Такие действия выполняет автомат перекоса вертолета. Он изменяет угол установки лопастей несущего винта (шаг винта), вращая их в осевых шарнирах посредством присоединенных к ним тяг. Обычно всегда присутствуют два канала управления: по тангажу и по крену, а также канал изменения общего шага несущего винта.
Тангаж означает угловое положение летательного аппарата относительно его поперечной оси (нос вверх-вниз ), а крен, соответственно, относительно его продольной оси (наклон влево-вправо ).
Конструктивно автомат перекоса вертолета выполнен достаточно сложно, но пояснить его устройство вполне можно на примере аналогичного узла модели вертолета. Модельный автомат, конечно, устроен попроще своего старшего собрата, но принцип абсолютно тот же .
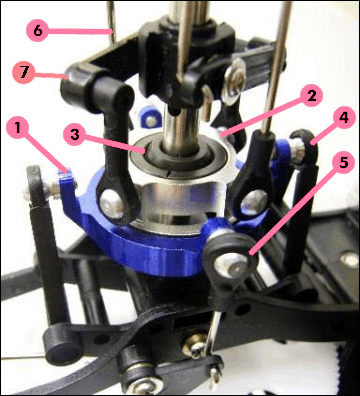
Рис. 6 Автомат перекоса модели вертолета
Это двухлопастной вертолет. Управление угловым положением каждой лопасти осуществляется через тяги 6. Эти тяги соединены с так называемой внутренней тарелкой2 (из белого металла). Она вращается вместе с винтом и в установившемся режиме параллельна плоскости вращения винта. Но она может менять свое угловое положение (наклон), так как закреплена на оси винта через шаровую опору 3. При изменении своего наклона (углового положения) она воздействует на тяги 6, которые, в свою очередь, воздействуют на лопасти, поворачивая их в осевых шарнирах и меняя, тем самым, циклический шаг винта.
Внутренняя тарелка одновременно является внутренней обоймой подшипника, внешняя обойма которого – это внешняя тарелка винта 1. Она не вращается, но может менять свой наклон (угловое положение) под воздействием управления по каналу тангажа 4 и по каналу крена 5. Меняя свой наклон под воздействием управления внешняя тарелка меняет наклон внутренней тарелки и в итоге наклон плоскости вращения несущего винта. В итоге вертолет летит в нужном направлении .
Общий шаг винта меняется перемещением по оси винта внутренней тарелки 2 при помощи механизма 7. В этом случае угол установки меняется сразу на обеих лопастях.
Для более лучшего понимания помещаю еще несколько иллюстраций втулки винта с автоматом перекоса.
Рис. 7 Втулка винта с автоматом перекоса (схема).
Рис. 8 Поворот лопасти в вертикальном шарнире втулки несущего винта.
Рис. 9 Втулка несущего винта вертолета МИ-8
| 